Amir Shapiro, Mechanical Engineering
Ronen Brafman, Computer Sciences
Nowadays robots perform a variety of tasks, and robotic manipulation is one of them. Although different tasks are done in an automated way, mostly the solutions are for a given object and a given repeating task. Designing and programming a robot to perform various tasks autonomously remains a challenge, especially in the field of human-robot interaction. Amazon Robotic Challenge presents an opportunity for teams across the world to present their state of the art solutions for autonomous picking and placing of various items, and even though the challenge is held for a third year in a row, still no universal solution that approaches to the performance of humans exists. A robotic system capable of automated manipulation tasks can be adapted for various fields, such as education, rehabilitation, an aid for elderly etc.
Our goal is to develop a set of primitive operation modules for grasping and manipulation of various (including previously unknown) objects, and using these modules to develop a system for automated manipulation planning for a given job that will operate by suitably combining the primitive operations. To achieve this, the first step will be to provide primitive functional modules for a wide variety of scenarios such as: anthropomorphic grasping of assorted items, motion planning for item manipulations, cluttered environment object recognition and localization with subsequent motion planning, manipulation of soft and deformable object, manipulation of multiple objects simultaneously and so on. When these primitives are designed and implemented, algorithms for global task planning can be developed and implemented. Solutions would use machine learning to achieve desired results and perform essential adaptations.
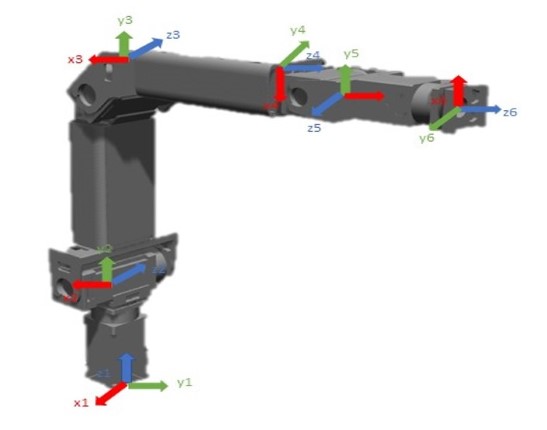
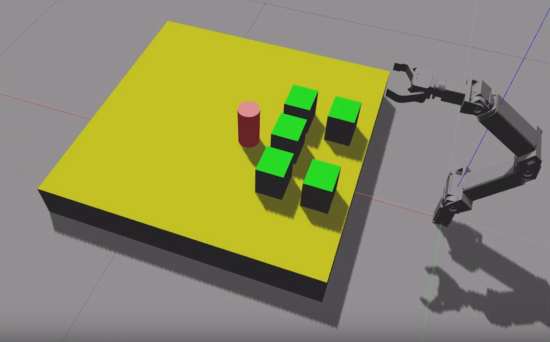
The recent research deals with the task of manipulating a set of objects located in a given configuration, using a flexible robotic arm designed for confined spaces. Our goal is to remove this set of objects from its initial configuration to a desired configuration by using a set of primitive manipulations. This work is divided into 2 main parts: the global task planning and the manipulation planning. From the task planning aspect, we developed a system for solving a rearrangement problem of a set of objects located on a plane surface. The plane is divided into a 2-dimensional discrete grid while the objects represented as single point on the grid. Each configuration of the objects on the surface is represented as node of a graph while the edges connecting each node to its neighbors is defined by the robotic arm capabilities of manipulating the set from one configuration to another. We use the A* algorithm for searching inside a graph in order to find the set of minimum manipulations needed to complete the task. From the manipulation planning aspect, we are working on the design of a flexible robotic arm for confined spaces. We also developed algorithms of the robotic arm motion planning in order to define its set of capabilities. The first algorithm is intended to solve the problem of an object located in a configuration that is inaccessible for robotic arm. In order to grasp the object, the algorithm will guide the arm by performing a set of manipulations on the object until it is graspable. Another algorithm that was developed, will determine the required relative configuration of multiple objects which we would like to simultaneously grasp or manipulate. The global task planning system uses these algorithms as primitives while planning the set of manipulations.