Michal Hochman, Yisrael Parmet and Tal Oron-Gilad
hochmanm@post.bgu.ac.il;
iparmet@bgu.ac.il; orontal@bgu.ac.il
Industrial engineering and Management, Ben-Gurion University of the Negev, Israel
To be presented at the RSS 2022 conference, 8-10, June 2022. Athens, Greece
Abstract
Background. External human-machine interfaces (eHMI) indicate Fully Autonomous Vehicles' (FAVs) intents, contributing to their communication with pedestrians. We still do not know enough about how eHMI propositions lead pedestrians to comply in conflicting situations.
Objective. Findings on fixed crossing scenes suggest that pedestrians' decision-making depends on the eHMI implementation and the car distance from the crossing. We aim to enhance this work, looking at dynamic crossing situations.
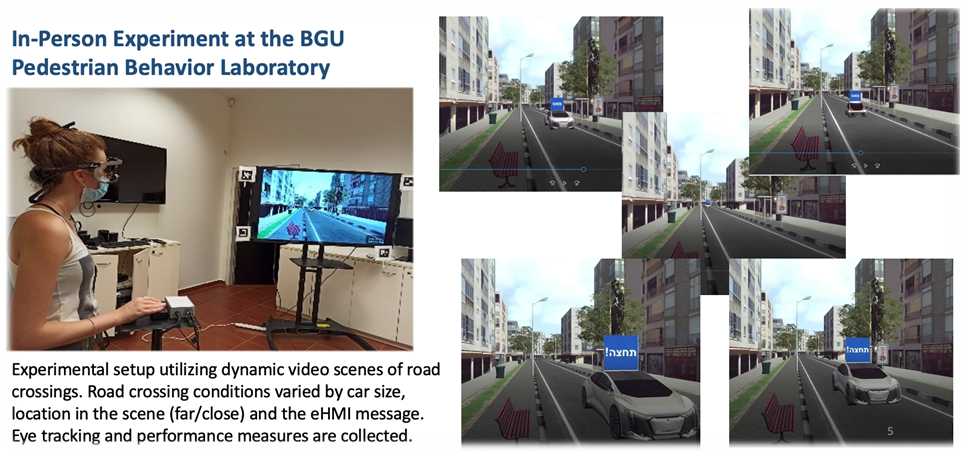
Method. Thirty-four adult participants observed 56 road-crossing video scenarios as if they were pedestrians intending to cross. A single FAV drove at 40 km/h. Scenarios differed by car size, eHMI message type, and the FAV's initial distance from the crossing place. Participants had to decide whether to cross or not by pressing designated buttons. Following each scenario, their subjective understanding of the FAV's intention was obtained. Decision measurements and eye-tracking data were collected.
Results. Eye-tracking data confirmed that all pedestrians fixated on the eHMI, yet only 53% of the responses were compatible with its proposition. More incompatible responses were observed for the close distance. An interaction between distance and eHMI intent revealed that when the eHMI indicated participants to cross, and the FAV's initial location was close, most participants decided not to cross. Distance influenced participants' response time; pedestrians decided faster in the closer distance. Overall, subjective understanding of the FAV's intention was low.
Conclusion. Using video-based scenarios, we showed that context and eHMI meaning combined affect pedestrians' crossing decisions. Relative to fixed scenes, pedestrians were more conservative in the dynamic scenarios and relied less on the eHMI suggestions. Interactions of distance and message meaning affected compatibility and response time. Even when pedestrians understood the eHMI message, they did not necessarily comply. Distance of the vehicle from the crossing place influenced the crossing decision, as it does today.
Keywords: Pedestrian behavior, external Human-Machine Interfaces (eHMI), distance from the crossing place